from d2l import mxnet as d2l
from mxnet import autograd, gluon, np, npx
from mxnet.gluon import nn
npx.set_np()Convolutions for Images
Why convolution works for images
A fully-connected layer on a 1-megapixel RGB image needs roughly 3 million weights per output unit — wildly wasteful, since pixel correlations are local and the same edge detector should work everywhere.
A convolutional layer swaps this for two strong inductive biases:
- Translation invariance — one small filter, slid everywhere with shared parameters.
- Locality — each output depends only on a small neighborhood of input pixels.
Thousands of parameters instead of millions, with exactly the right prior for natural images.
2-D cross-correlation
Slide a small kernel \mathbf{K} over the input \mathbf{X}. At each position, multiply elementwise and sum:
Y[i, j] = \sum_{a, b} X[i+a, j+b]\, K[a, b].

Cross-correlation: 3×3 input × 2×2 kernel → 2×2 output. Shaded element: 0{\cdot}0 + 1{\cdot}1 + 3{\cdot}2 + 4{\cdot}3 = 19.
The output is smaller than the input by k - 1 in each direction — same shrinking we’ll undo with padding next section.
Setup for implementation
Two nested loops over output positions. Each cell is a slice multiplied elementwise with the kernel and summed:
Implementing cross-correlation
Verify cross-correlation
Verify against the figure — 3×3 input × 2×2 kernel → 2×2 output with the worked-out values:
array([[19., 25.],
[37., 43.]])A conv layer is corr2d + bias
Wrap the operator as a learnable Module. Two parameters: the kernel weights and a scalar bias:
These are the only learnable parameters of a single-channel conv layer. A 3×3 conv has nine weights regardless of input size — that’s the parameter savings the inductive bias buys us.
What kernels actually do: edge detection
Build an image with a vertical edge in the middle: 1s on the outsides, 0s in the middle four columns:
array([[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.]])The output is the edge map
Cross-correlate the image with the difference kernel: +1 at each white→black transition, -1 at each black→white, zero everywhere else:
array([[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.]])Transpose the image so the edge is now horizontal — the same kernel detects nothing:
array([[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.]])Filters are direction-sensitive. Real ConvNets stack many filters per layer to cover all directions / patterns.
Learning the kernel
We don’t have to design kernels by hand. Random init, SGD on squared error against ground truth \mathbf{Y}:
# Construct a two-dimensional convolutional layer with 1 output channel and a
# kernel of shape (1, 2). For the sake of simplicity, we ignore the bias here
conv2d = nn.Conv2D(1, kernel_size=(1, 2), use_bias=False)
conv2d.initialize()
# The two-dimensional convolutional layer uses four-dimensional input and
# output in the format of (example, channel, height, width), where the batch
# size (number of examples in the batch) and the number of channels are both 1
X = X.reshape(1, 1, 6, 8)
Y = Y.reshape(1, 1, 6, 7)
lr = 3e-2 # Learning rate
for i in range(10):
with autograd.record():
Y_hat = conv2d(X)
l = (Y_hat - Y) ** 2
l.backward()
# Update the kernel
conv2d.weight.data()[:] -= lr * conv2d.weight.grad()
if (i + 1) % 2 == 0:
print(f'epoch {i + 1}, loss {float(l.sum()):.3f}')epoch 2, loss 5.413
epoch 4, loss 0.909
epoch 6, loss 0.153
epoch 8, loss 0.026
epoch 10, loss 0.004Convolution as matrix multiplication
Every output element is a dot product: flattened patch times flattened kernel. Stack all the patches as rows of a matrix and the whole convolution becomes one matmul (the im2col trick):
X = d2l.tensor([[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]])
K = d2l.tensor([[0.0, 1.0], [2.0, 3.0]])
h, w = K.shape
p_h, p_w = X.shape[0] - h + 1, X.shape[1] - w + 1
patches = d2l.stack([d2l.reshape(X[i:i + h, j:j + w], (-1,))
for i in range(p_h) for j in range(p_w)])
Y_mat = d2l.reshape(d2l.matmul(patches, d2l.reshape(K, (-1, 1))), (p_h, p_w))
Y_mat, d2l.reduce_sum(d2l.abs(Y_mat - corr2d(X, K)))(array([[19., 25.],
[37., 43.]]),
array(0.))This is why convolutions run fast on hardware built for dense matrix multiplication.
Receptive field: stacking deepens reach
The receptive field of an output cell = the set of input positions that can affect it.
- A 2×2 kernel: receptive field = 2×2 pixels.
- Two stacked 2×2 layers: each output cell sees 3×3 input.
- L layers, kernel k_i, stride s_i: r = 1 + \sum_{i=1}^{L} (k_i - 1) \prod_{j<i} s_j.
- Stack L layers of 3×3, stride 1: (2L + 1) \times (2L + 1).
Local kernels + depth = global reach without the parameter cost of large kernels.
Trained filters look biological
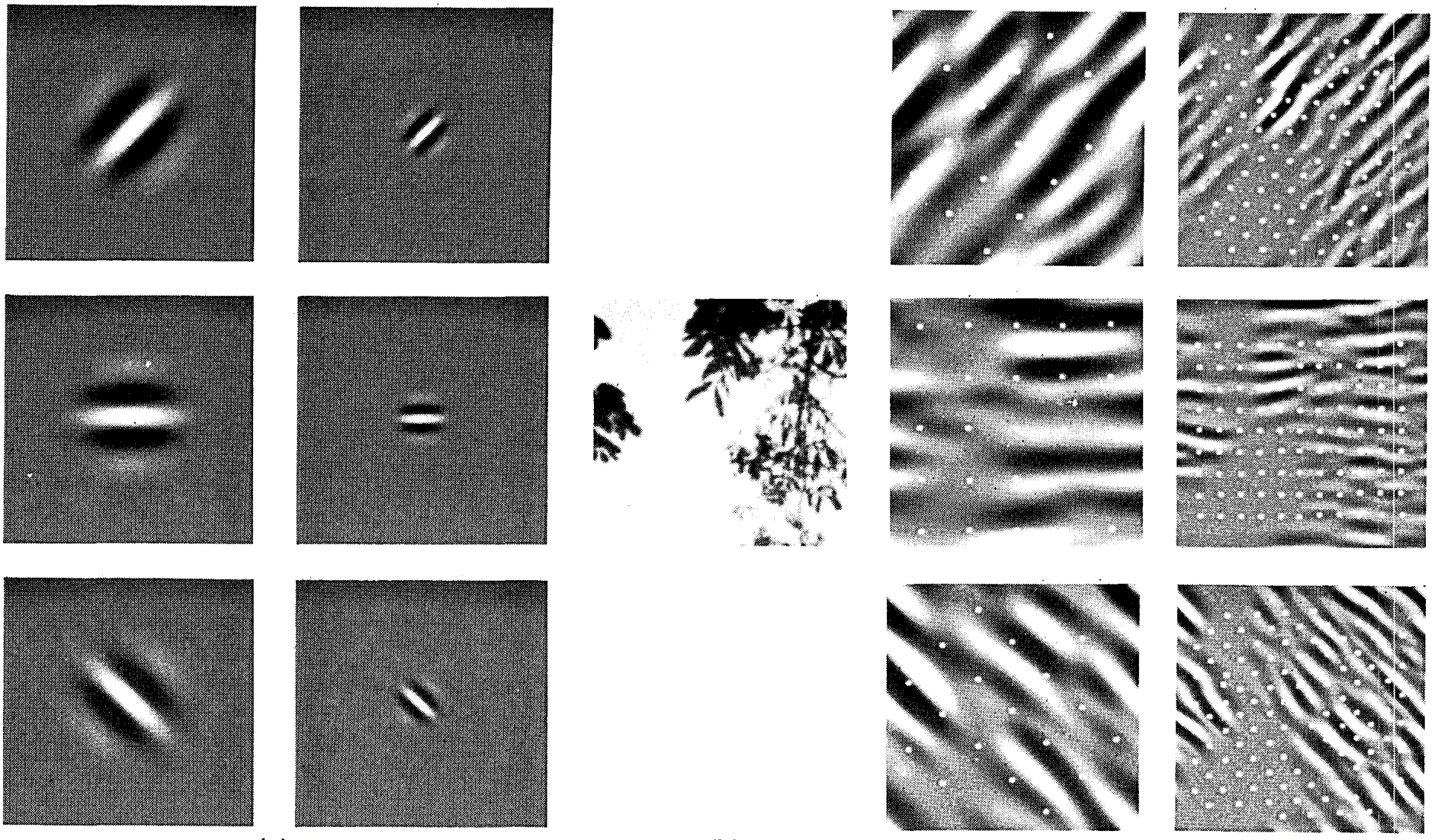
Hubel & Wiesel-style filters in the visual cortex. Trained CNN filters develop similar shapes.
Recap
- Conv layer = small kernel slid across input + bias.
- Inductive biases: translation equivariance + locality → orders of magnitude fewer parameters than fully connected.
- Hand-designed kernels can detect edges, blobs, blurs; trained kernels discover whatever the loss demands.
- Receptive fields grow with depth — a deep stack of small kernels covers a large input region.
- Filters look biologically plausible: the same shapes visual cortex neurons respond to.