%matplotlib inline
from d2l import jax as d2l
import jax
from jax import numpy as jnp
import optax
import numpy as np
import osSemantic Segmentation Data
Semantic segmentation assigns a class label to every pixel, not just to the image as a whole. Output shape = input shape; output channels = number of classes.
Two related tasks to keep distinct:
- Image segmentation — group pixels by similarity (no semantic labels). Pure clustering.
- Instance segmentation — like semantic, but separate instances of the same class get different labels (Mask R-CNN).

Semantic segmentation: pixel-level labels for dog, cat, background.
This deck sets up the PASCAL VOC 2012 dataset and the data plumbing for FCN training (next deck).
Reading images and labels
Inputs are RGB images; labels are RGB images too — the class is encoded in the color, not in a 1-channel id tensor:
def read_voc_images(voc_dir, is_train=True):
"""Read all VOC feature and label images."""
from PIL import Image
txt_fname = os.path.join(voc_dir, 'ImageSets', 'Segmentation',
'train.txt' if is_train else 'val.txt')
with open(txt_fname, 'r') as f:
images = f.read().split()
features, labels = [], []
for i, fname in enumerate(images):
features.append(np.array(Image.open(os.path.join(
voc_dir, 'JPEGImages', f'{fname}.jpg'))))
labels.append(np.array(Image.open(os.path.join(
voc_dir, 'SegmentationClass', f'{fname}.png')).convert('RGB')))
return features, labels
train_features, train_labels = read_voc_images(voc_dir, True)n = 5
imgs = train_features[:n] + train_labels[:n]
d2l.show_images(imgs, 2, n);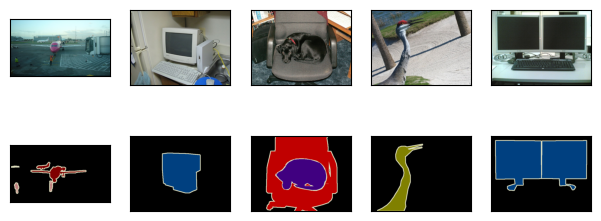
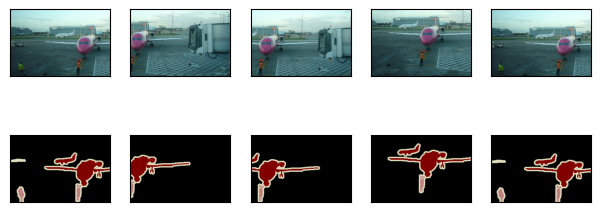
Crop, not resize
Standard image preprocessing resizes — but resizing the label would interpolate class IDs, which is meaningless. Use random crop on both image and label, with the same random window:
def voc_rand_crop(feature, label, height, width):
"""Randomly crop both feature and label images."""
# feature and label are HWC numpy arrays
h, w = feature.shape[0], feature.shape[1]
top = np.random.randint(0, h - height + 1)
left = np.random.randint(0, w - width + 1)
feature = feature[top:top+height, left:left+width, :]
label = label[top:top+height, left:left+width, :]
return feature, labelimgs = []
for _ in range(n):
imgs += voc_rand_crop(train_features[0], train_labels[0], 200, 300)
d2l.show_images(imgs[::2] + imgs[1::2], 2, n);